相关商品








【奥松新品】AS-6DOFB六自由度机械臂玩家测评
编辑:Eric2013-11-30 浏览次数:2595
六自由度的行走机器人?不知道你怎么看,反正我是玩腻了。前几天偶然得到一款奥松公司出的AS-6DOFB六自由度机械臂,觉得这个机械臂挺酷的。大家都知道6自由度的机械手臂,3个自由度控制末端位置,另外3个自由度控制末端姿势。从理论上说这是个完美的方案,模拟人的机械手臂,完全没有问题!现实会是怎样呢?待我从头道来。

图1 AS-6DOFB型六自由度机械臂
奥松RobotBase出品的机械臂不是组装好的,需要玩家自己组装。这可是过组装瘾的好机会哦,我这个机器人迷已经迫不及待了。
1、机械部分:机器臂骨架一套、机械手爪一套、杯式轴承3个、螺钉螺母若干。
3、电控部分:32路舵机控制器一台。
4、电源部分:双路输出开关电源(220V交流转5V、12V直流)。
注:我的还配了一块Arduino控制器以备以后扩展传感器用。
在正式开始组装时我们还需要准备一些必须的工具。官方推荐的有:两把字螺丝刀和一把尖嘴钳。本人强烈建议各位玩家还要再备一把尖嘴钳(嘿嘿,到组装时你就会知道它的用处)。

图2 需要的工具
下面正式开始组装六自由度机械臂,当然得参照官方给出的AS-6DOFB型六自由度机械臂安装说明手册 v2.0版。
第一步:舵机复位
舵机并不是连续转动的,所以舵机的初始位置会影响机械臂最终的复位姿态。包装盒的舵机由于厂商测试的原因可能并不是出于中位的,所以在正式安装舵机之前一定要将用上位机将舵机恢复中位。具体的操作步骤如下:
1、打开附带的光盘,安装舵机控制器的上位机软件。
2、将32路舵机控制器与电脑联机,将需要恢复中位的舵机与舵机控制器相连。关于32路舵机控制器的使用方法可见奥松公司出的32路伺服舵机控制器用户手册以及使用演示视频
3、勾选相应的电机路数。拨动舵机测试进度条,测试电机的运动范围。
4、点击舵机控制器软件右下角的电机复位键,使电机恢复中位。
注:舵机恢复中位以后不要再转动舵机轴,以免需要重新恢复中位。
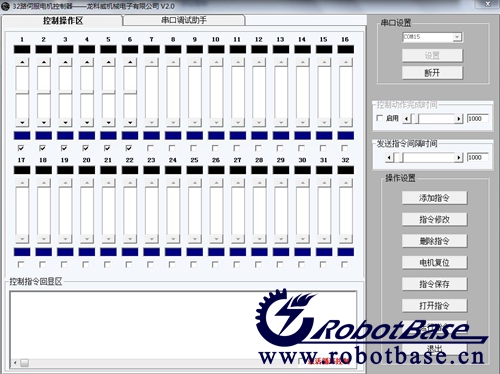
图3舵机控制器软件界面
第二步:安装支撑螺柱
取出黑色底盘拧上11个10cm的下支撑六角铜螺柱和3个30cm的上支撑六角铜柱,如图3所示。黑色底盘上预置大量元器件安装孔,焊上一些自己搭的小电路是再合适不过的了。
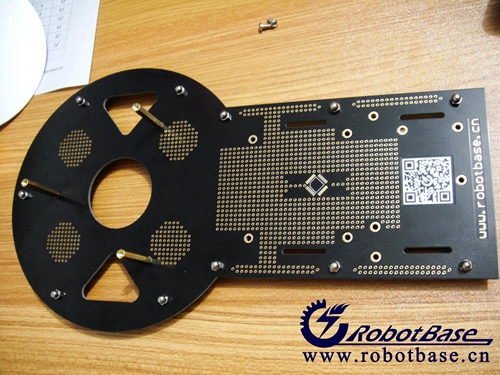
图4 底盘上安装螺柱
第三步:安装分度盘
取出分度圆盘,安装上第一台舵机。再将分度圆盘安装到上一步装好的底座上,用3个上支撑6角铜柱定位 。
注意:这里拧紧舵机的是M4×8的内置橡胶圈的防松螺钉螺母套件。这个在包装盒里能找到,应该是盒中最大的螺钉了。这种螺母不好配,玩家们千万别弄丢了哦。

图5 分度盘的安装
第四步:第关节舵机支架的安装
这一步中我们只需要取出包装盒中的铝制转盘和舵机支架用4个M4×8防松螺钉螺母连接即可。
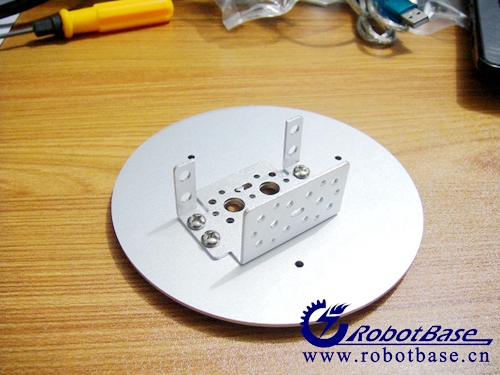
图6 安装舵机支架与金属圆盘
第五步:底座组装
这一步比较复杂我们分几个小步来完成。
1、我们要将三个10cm的六角铜柱拧紧在上一步组装好的圆盘上,这个是用来定位下面即将出场的止推轴承的。
2、取出包装盒中的止推轴承就是那个铝合金的大圆环。内外都能转的那个零件。将它套在六角铜柱上(尺寸应该是正合适的)。
3、取出包装盒中的金属舵盘将其用金属舵盘自带的螺钉拧在金属圆盘的底部。注意:是金属舵盘,不是舵机袋里的黑色塑料舵盘不要弄错了。我就是没注意用了塑料舵盘,装到最后才发现出错了,又花费大量的时间拆了重装。金属舵盘不易变形,承载能力大,从这个里看出奥松的细节部分还是挺到位的。
4、将舵盘安装在第一个舵机上,并用舵机自带的螺钉拧紧。注意一定要注意舵盘安装的方向,否则机械臂会不正。
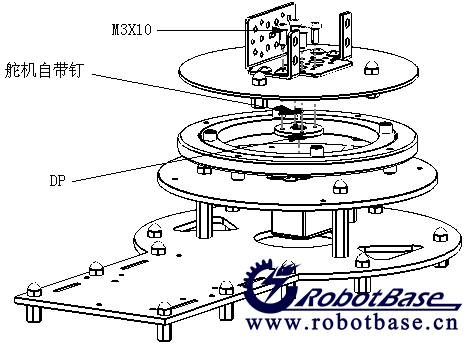
图7 官方给的安装示意图
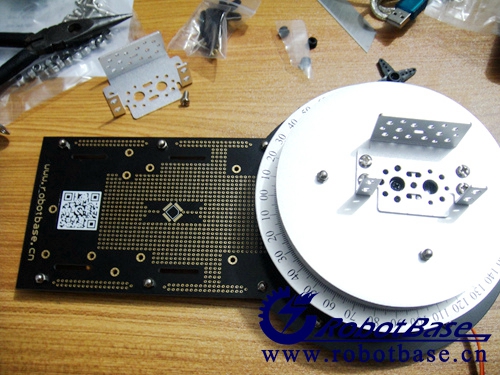
图8 实际安装后的效果图
第六步:安装第二关节舵机
这一步也比较容易,只需要将杯式轴承,和舵盘按图依次连接安装即可。但要注意U型架的方向是垂直于底盘向上的。

图9 第二关节舵机的安装
第七步:安装第三关节舵机
.jpg)
图10第二关节舵机支架与U型架连接
.jpg)
图11 第三关节舵机安装完毕
第八步:安装垂直舵机
垂直舵机是将两个舵机安装成舵机转轴相互垂直的形式,其目的是为了改变手爪的方向。在安装的过程中,首先将两个舵机按安装手册中的方位连接再用杯式轴承将最后一个U型架按图连接上。然后将第四、第五关节舵机分别安装在两个舵机支架上便可。一定要按图中所示的舵机方向安装,我在这里又吃了回苦头!
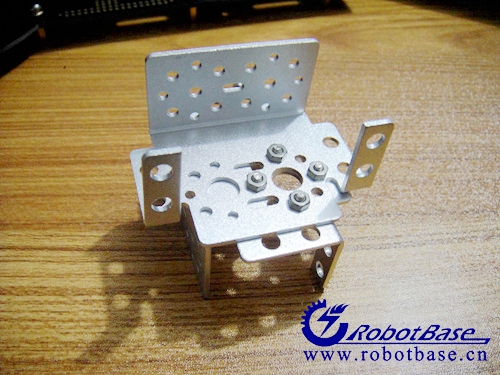
图12垂直安装的舵机支架
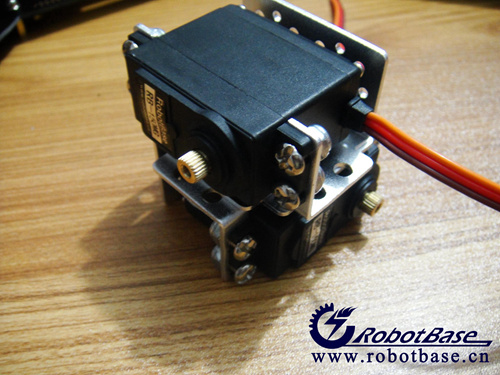
图13 垂直的舵机轴
第九步:组合体安装
这一步看起来简单,只需拧3颗螺钉即可,却是最让我为难的地方,可以安装螺钉的空间实在是太小了。着实费了一番力气才给装上。在这里可以教给大家一个小窍门:这里的三颗螺钉大家其实可以倒着安装,将螺母留在外面以方便拧紧。
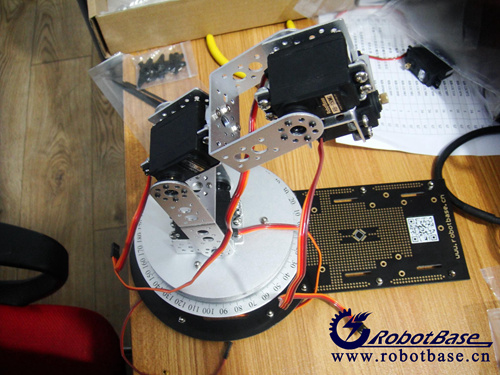
图14组合体安装
第十步:夹持器的安装
夹持器的安装非常简单,只需要调整好手爪啮合齿轮的位置,再将最后一台舵机拧上就行。夹持器组装完成后将其同过舵盘连接在机械臂的末端。
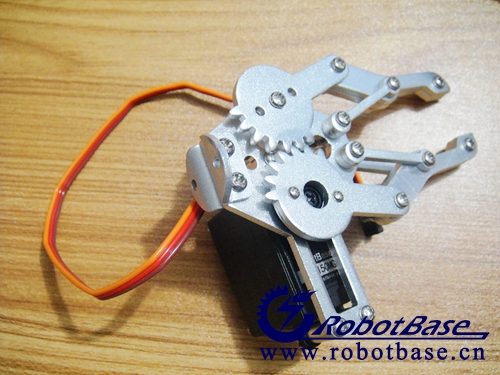
图15夹持器

图16:机械臂安装完成
第十一步:安装舵机控制器
经过以上十步整个机械臂的机械部分顺利完成,下面开始安装电控部分。要进行如下几步:
1、将32路舵机控制器用铜柱固定在机械臂底座上。
2、将舵机的控制线插到舵机控制器的六路输出上。注意黄色为舵机信号线,不要接错哦。
3、给舵机控制器供电,绿色的伺服控制供电端接6V电压。红色的控制器供电端接12V。我用的是开关电源,直接将电源线引出接上即可。
第十二步:最终调试
在调试这一步主要是为了调试机械臂的初始位置,让机械臂保持一个最佳的姿态,防止在运动过程中舵机堵转,烧坏舵机。我设置的最佳姿势如下图所示。舵机复位以后,与标准姿势对比,如果有关节需要调整则松下舵盘螺钉,调整到合适位置即可。

图17最终完成的图1AS-6DOFB型六自由度机械臂
至此图AS-6DOFB型六自由度机械臂全部安装完成,在整个安装过程中除了个别位置的螺丝安装不变以外,其余的都相当顺利。在最近一段时间的亲身体验中,我发现他基本上能模拟六自由度的工业机器人。
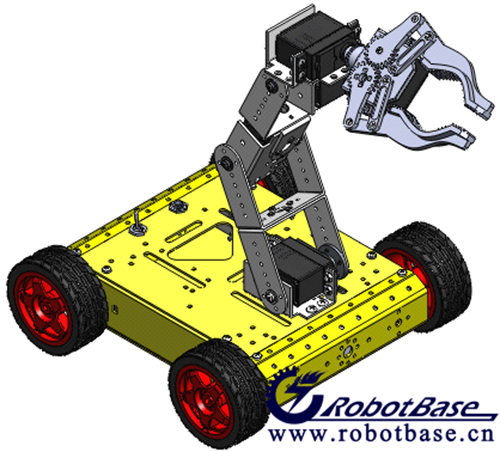
图18智能车平台&机械手
同时作为一名有机械背景的玩家,我也能感受到AS-6DOFB型六自由度机械臂设计者精益求精良苦用心。本人认为此款6自由度机械手是非常有前瞻性的非常适合玩家进行二次开发。如果将其安装在智能车上,它将会打破以往智能车只能进行智能运动的玩法。使智能车有更强的使用性能。
相关链接:
机械臂安装手册:http://www.docin.com/p-390171610.html
机 械 臂 网 址 :http://www.alsrobot.cn/goods-229.html
32路舵机控制器:http://www.alsrobot.cn/goods-48.html
用户评价
暂时还没有任何用户评论


